Mohammed Ibrahim
The requirements for RKE project is taken from https://cruizbyte.co.in/training-blog/f/remote-keyless-entry
The RKE project has following
features:
1. Door Lock
2. Door Unlock
3. Tail-gate open
4. Vehicle Search
5. Panic Alarm
6. Auto Locking
7. Auto un-locking
8. Auto re-locking
9. Emergency Unlocking
10. Anti-Theft Alarm function
11. Beep function
12. Mute/ Un mute function.
The following application is developed for
RKE implementation.
The system level block diagram of RKE is given below

//==============Program for RKE Feature Application=====
//=Initializing the variable for remote keyless entry Button=
bool lock_button, unlock_button, trunk_button;
//========Declaring the variables for Input Parameters===
bool driver_dr_switch, passenger_dr_switch, rear_lh_dr_switch, rear_rh_dr_switch, trunk_dr_switch;
//Initializing the
variable for dr switches
int Key_cylinder_switch =2; //1-OFF, 2-ON/ACC
int speed_sensor_input,
dr_unlock_button_press_timer, dr_lock_button_press_timer, battery_power;
//=======Declaring the variables for Output Parameters===
bool hazard_lamp, alarm_horn, RCM_module, buzzer;
bool driver_dr_solenoid_valve,
passenger_dr_solenoid_valve, rear_lh_dr_solenoid_valve;
bool rear_rh_dr_solenoid_valve,
trunk_dr_solenoid_valve, Driver_center_lock, vehicle_armed;
//=================== Function DECLARATION========
//=============== Hazard lamp Lock
Function==================
void hazard_lamp_lock()
//Declaring functions to activate hazardous lamp and alarm horn when RKE locks
the door
{
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
//============== Hazard lamp Unlock Function=========
void hazard_lamp_unlock()
{
int i;
for (i = 1; i <= 2; i++)
{
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
}
//========= Function to check all the doors are closed======
int door_closed() {
if (driver_dr_switch == 1 &&
passenger_dr_switch == 1 && rear_lh_dr_switch == 1 &&
rear_rh_dr_switch == 1 && trunk_dr_switch == 1)
{
return 1;
}
else
{
return 0;
}
}
//========== Function to check all the doors are open====
int door_opened() {
if (driver_dr_switch == 0 ||
passenger_dr_switch == 0 || rear_lh_dr_switch == 0 || rear_rh_dr_switch == 0 ||
trunk_dr_switch == 0)
{
return 1;
}
else
{
return 0;
}
}
//======== Function to lock the door solenoid valves =======
int door_lock() {
driver_dr_solenoid_valve =
passenger_dr_solenoid_valve = rear_lh_dr_solenoid_valve =
rear_rh_dr_solenoid_valve = trunk_dr_solenoid_valve = 1;
Serial.println("All doors are locked
successfully");
vehicle_armed = 1;
}
//======== Function to Unlock the door solenoid valves =====
int door_unlock() {
driver_dr_solenoid_valve =
passenger_dr_solenoid_valve = rear_lh_dr_solenoid_valve =
rear_rh_dr_solenoid_valve = 0;
Serial.println("All doors are unlocked
successfully");
vehicle_armed = 0;
}
//=== Function to check the doors are unlocked for theft ====
bool door_unlock_check_theft()
{
if (driver_dr_solenoid_valve == 0 ||
passenger_dr_solenoid_valve == 0 || rear_lh_dr_solenoid_valve == 0 ||
rear_rh_dr_solenoid_valve == 0 || trunk_dr_solenoid_valve == 0 ||
driver_dr_switch == 0 || passenger_dr_switch == 0 || rear_lh_dr_switch == 0 ||
rear_rh_dr_switch == 0 || trunk_dr_switch == 0 )
{
return 1;
}
else
{
return 0;
}
}
//==== Function to check all the doors are locked====
bool door_lock_check()
{
if (driver_dr_solenoid_valve ==
passenger_dr_solenoid_valve == rear_lh_dr_solenoid_valve ==
rear_rh_dr_solenoid_valve == trunk_dr_solenoid_valve == 1)
{
return 1;
}
else
{
return 0;
}
}
//====== Alarm function
declaration==========================
int timer_alarm() {
while (millis() <= 30003)
{
Serial.println("Hazard lamp
with alarm horn activated for 30s");
hazard_lamp = alarm_horn =
1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
}
//============Beep
Function================================
int beep_function()
{
while (door_opened() == 1 &&
millis()<30000) //when all doors are locked
{
buzzer = 1;
Serial.println("Buzzer
ON,Please close the door");
}
if(door_opened() == 0)
{
buzzer = 0;
Serial.println("Buzzer
off");
}
}
void setup() {
Serial.begin(9600);
//======== Door lockig Comments ===========
//Condition to lock all the doors when lock button input received
void RKE_lock_Func();
{
if (lock_button == 1 &&
dr_lock_button_press_timer < 3)
{
if
(door_closed() == 1)
{
if(battery_power<30)
//Monitorig RKE battery
{
Serial.println("RKE battery is too low");
}
door_lock();
hazard_lamp_lock();
while(door_opened()==1)
{
beep_function();
if (unlock_button == 0 && ( Key_cylinder_switch == 2 ||
door_unlock_check_theft() == 1) )
//Anti-theft
alarm activation while opening of any doors after vehicle armed
{
hazard_lamp = alarm_horn = 1;
Serial.println("Alert!!! Theft attempt");
}
}
}
else
{
Serial.println("Please close all doors and try again");
}
}
}
//=condition to check vehicle speed is above
20km/hr then automatically close all doors - Auto lock
if (Key_cylinder_switch == 2)
{
if (speed_sensor_input > 20 )
{
door_lock();
}
}
//=Condition to
check driver door lock knob is closed then close all the door - Center
lock=====
if (door_closed() == 1)
{
if (Driver_center_lock == 1)
{
door_lock();
hazard_lamp_lock();
beep_function();
}
}
//=========== Door Unlocking =====================
//======Condition to unlock all the doors by getting input from RKE======
if (unlock_button == 1 &&
vehicle_armed == 1 )
{
if (dr_unlock_button_press_timer
< 3)
{
door_unlock();
millis();
hazard_lamp_unlock();
//Auto-relocking
while (door_closed()
== 1)
{
Serial.println("Timer begins");
if
(millis() > 30000)
{
door_lock();
hazard_lamp_lock();
}
}
}
if(dr_unlock_button_press_timer
> 3)
{
switch (Key_cylinder_switch)
{
case 1:
timer_alarm();
break;
case 2:
timer_alarm();
break;
}
}
else
{
Serial.println("Task incomplete");
}
}
//=======Condition to unlock all the doors when key turned off - Auto Unlocking====
if (Key_cylinder_switch == 1
&& speed_sensor_input == 0)
{
door_unlock();
hazard_lamp_unlock();
}
//=====Condition to unlock all the doors at emergency suituation=========
if (RCM_module == 1) //During accident or
any emergency all doors unlocked
{
door_unlock();
hazard_lamp = alarm_horn = 1;
Serial.print("Alert!!!All
doors opened");
}
//=========Condition to unlock trunk door========
if (trunk_button == 1 )
{
int i;
if (trunk_dr_solenoid_valve ==
1)
{
trunk_dr_solenoid_valve = 0;
Serial.println("trunk door unlocked successfully");
for ( i = 1; i <=
4; i++)
{
hazard_lamp = 1;
delay(500);
hazard_lamp = 0;
}
}
}
//==============mute/unmute function===============
int m;
if (lock_button == 1) //checking vehicle
locked
{
while
(dr_lock_button_press_timer >= 3 && millis()<30000)
{
buzzer = alarm_horn
= 0;
Serial.println("buzzer muted");
while(m>2)
{
hazard_lamp = 1;
delay(500);
hazard_lamp = 0;
m++;
}
}
}
//=======Special conditions if any doors opened with RKE locked hazazard lamp flash for five times with alarm===== if (lock_button == 1 && dr_lock_button_press_timer < 3)
{
if (door_opened() == 1)
{
int i;
Serial.println("please
close all the doors");
for (i = 1; i <=
5; i++)
{
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
}
}
//====Condition to lock the door if driver door closed but any other door opened ====
if (door_opened() == 1)
{
if (lock_button == 1 &&
dr_lock_button_press_timer <= 3)
{
if (driver_dr_switch
== 1)
{
driver_dr_solenoid_valve = 1;
Serial.println("Driver door closed");
if
(passenger_dr_switch == 1)
{
passenger_dr_solenoid_valve = 1;
Serial.println("Passenger door closed");
}
else
{
Serial.println("Please close Passenger door");
}
if
(rear_lh_dr_switch == 1)
{
rear_lh_dr_solenoid_valve = 1;
Serial.println("rear lh door closed");
}
else
{
Serial.println("Please close rear lh door");
}
if
(rear_rh_dr_switch == 1)
{
rear_rh_dr_solenoid_valve = 1;
Serial.println("rear rh door closed");
}
else
{
Serial.println("Please close rear rh door");
}
if
(trunk_dr_switch == 1)
{
trunk_dr_solenoid_valve = 1;
}
else
{
Serial.println("Please close trunk door");
}
hazard_lamp_lock();
}
}
}
// =====If driver door is opened while RKE locking========
if (lock_button == 1 &&
dr_lock_button_press_timer <= 3)
{
if(driver_dr_switch == 0)
{
Serial.println("RKE lock
function not activated and close the driver door and relock with RKE");
}
}
}
RKE TEST report

//**************************************************************
CAN Instrument Cluster Implementation
The requirements for IC is taken from https://cruizbyte.co.in/training-blog/f/instrument-cluster-tell-tales-and-warning-lights
A CAN restbus simulation is configured for sending
and receiving CAN messages. CAN messages are decoded for IC tell-tales
status signals & application is developed based on CAN DBC file. Few messages are sent to other nodes in the CAN bus.
Tell-tale status is simulated in Serial terminal with a serial print show casing CAN signal value table description such as ON, OFF, BLINK & Reserved.
//====Instrument Cluster Tell Tale Implementation with CAN
#include <SPI.h>
//Including
CAN communication Header
#include
<mcp2515.h>
#include "ArduinoEasynextion.h"
struct can_frame canMsg;
MCP2515 mcp2515(10);
//=====Declaring Variables for input parameters========
int FOG_LAMP_SIGNAL, VEHICLE_ARMED_STATUS,
REAR_FOG_LAMP, HEAD_LAMP_HIGH_BEAM;
int TURN_LEFT[2] , TURN_RIGHT[2],
DRIVER_DOOR_SIGNAL, PASSENGER_DOOR_SIGNAL;
int REAR_LH_DOOR,REAR_RH_DOOR, TAILGATE_OPEN_WARN,
DOOR_AJAR_WARN;
int PARKING_BRAKE_STATUS,LOW_WASHER_FLUID;
int GLOW_PLUG, WATER_IN_FUEL, CRUISE_CONTROL[2],
OIL_PRESS, CHECK_ENGINE[2], OBD_CHECK;
int ENGINE_SPEED[8],Start_stop, Battery_warn,
DPF_Warn_lamp, DEF_Warn_lamp, REDUCED_POWER;
int EPS_WARN, VEHICLE_SPEED[8],
FR_LH_W_SPEED[8],FR_RH_W_SPEED[8], RR_LH_W_SPEED[8];
int RR_RH_W_SPEED[8];
int Vehicle_overspeed_warn, EPB_WARN,
ABS_MALFUNCTION, ESP_WARN_LAMP[2];
int lock_signal, unlock_signal, Trunk_unlock_signal,
Search_func, Mute_func;
int seat_belt_warn,Pass_Airbag_cuttoff,
Airbag_warn, Warn_4WD[2],Lock_4WD, Transmission_warn;
int
FR_LH_Tire_press[4],FR_RH_Tire_press[4],RR_LH_Tire_press[4],RR_RH_Tire_press[4],Tire_press_warn;
//====Declaring Variables to store the Data from CAN Message
int canmsg_350_1[8], canmsg_355_1[8], canmsg_365_1,
canmsg_370_1[8],canmsg_380_1[8], canmsg_390_1;
int canmsg_360_1,
canmsg_395_1,canmsg_400[8],canMsg_350_byte_1, canMsg_350_byte_2,canMsg_355_byte_1;
int canMsg_355_byte_2,canMsg_355_byte_3,
canMsg_360_byte_1;
//===Declaring CAN meassage to Transmit==========
struct can_frame canMsg1;
struct can_frame canMsg2;
struct can_frame canMsg3;
struct can_frame canMsg4;
struct can_frame canMsg5;
struct can_frame canMsg6;
struct can_frame canMsg7;
struct can_frame canMsg8;
struct can_frame canMsg9;
void setup() {
Serial.begin(115200); //Baud-Rate
mcp2515.reset();
mcp2515.setBitrate(CAN_500KBPS,
MCP_8MHZ);
mcp2515.setNormalMode();
Serial.println("------- CAN Read
----------");
Serial.println("ID DLC DATA");
}
void loop() {
if (mcp2515.readMessage(&canMsg) ==
MCP2515::ERROR_OK) {
//========RECEIVE BCM CAN MESSAGE DATA=========
if (canMsg.can_id == 0x350)
{
for (int i = 0;
i < canMsg.can_dlc; i++) { // print the data
canmsg_350_1[i]
= canMsg.data[i];
}
if(canMsg.can_id
== 0x350)
{
Serial.print(canMsg.can_id,
HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print("
");
}
for
(int i = 0; i < canMsg.can_dlc; i++)
{
Serial.print(canmsg_350_1[i]);
Serial.print(" ");
}
Serial.println();
for(int
i=0;i<=7;i++)
{
if(canmsg_350_1[0]
& (1<<i))
{
if(i==0)
{
FOG_LAMP_SIGNAL=1;
}
if(i==1)
{
VEHICLE_ARMED_STATUS
=1;
}
if(i==2
)
{
REAR_FOG_LAMP=1;
}
if(i==3
)
{
HEAD_LAMP_HIGH_BEAM=1;
}
if(i==4
|| i==5)
{
if(i==4)
{
TURN_LEFT[0]=1;
}
else
{
TURN_LEFT[1]=1;
}
}
if(i==6
|| i==7)
{
if(i==6)
{
TURN_RIGHT[0]=1;
}
else
{
TURN_RIGHT[1]=1;
}
}
}
else
if(0)
{
if(i==0)
{
FOG_LAMP_SIGNAL=0;
}
if(i==1)
{
VEHICLE_ARMED_STATUS
=0;
}
if(i
== 2)
{
REAR_FOG_LAMP=0;
}
if(i
== 3)
{
HEAD_LAMP_HIGH_BEAM=0;
}
if(i==4
|| i==5)
{
if(i==4)
{
TURN_LEFT[0]=0;
}
else
{
TURN_LEFT[1]=0;
}
}
if(i==6
|| i==7)
{
if(i==6)
{
TURN_RIGHT[0]=0;
}
else
{
TURN_RIGHT[1]=0;
}
}
}
}
for(int
i=0;i<=7;i++)
{
if(canmsg_350_1[1]
& (1<<i))
{
if(i==0)
{
DRIVER_DOOR_SIGNAL=1;
}
if(i==1)
{
PASSENGER_DOOR_SIGNAL
=1;
}
if(i==2
)
{
REAR_LH_DOOR=1;
}
if(i==3
)
{
REAR_RH_DOOR=1;
}
if(i==4)
{
TAILGATE_OPEN_WARN=1;
}
if(i==5)
{
DOOR_AJAR_WARN=1;
}
if(i
== 6)
{
PARKING_BRAKE_STATUS
=1;
}
if(i
== 7)
{
LOW_WASHER_FLUID
=1;
}
}
else
if(0)
{
if(i==0)
{
DRIVER_DOOR_SIGNAL=0;
}
if(i==1)
{
PASSENGER_DOOR_SIGNAL
=0;
}
if(i
== 2)
{
REAR_LH_DOOR=0;
}
if(i
== 3)
{
REAR_RH_DOOR=0;
}
if(i==4)
{
TAILGATE_OPEN_WARN=0;
}
if(i==5)
{
DOOR_AJAR_WARN=0;
}
if(i
== 6)
{
PARKING_BRAKE_STATUS
=0;
}
if(i
== 7)
{
LOW_WASHER_FLUID
=0;
}
}
}
//======================================Fog_Lamp
Signal=========================================
if (FOG_LAMP_SIGNAL == 0){Serial.println("Fog
Lamp off ");}
else{Serial.println("Fog Lamp ON ");}
//===========VEHICLE_ARMED_STATUS_Lamp Signal==============
if (VEHICLE_ARMED_STATUS ==
0){Serial.println("VEHICLE_ARMED_STATUS Lamp off ");}
else{Serial.println("VEHICLE_ARMED_STATUS Lamp
ON ");}
//===========HEAD_LAMP_HIGH_BEAM LAMP Signal=================
if (HEAD_LAMP_HIGH_BEAM ==
0){Serial.println("HEAD_LAMP_HIGH_BEAM off ");}
else{Serial.println("HEAD_LAMP_HIGH_BEAM ON
");}
//==========TURN_LEFT LAMP Signal==================
{
if(TURN_LEFT[0] == 0 && TURN_LEFT[1]
== 0)
{Serial.println("TURN_LEFT_lamp
OFF");}
else if(TURN_LEFT[0] == 0 &&
TURN_LEFT[1] == 1)
{
Serial.println("TURN_LEFT_lamp ON");}
else if (TURN_LEFT[0] == 1 &&
TURN_LEFT[1] == 0)
{Serial.println("Reserved");}
else if (TURN_LEFT[0] == 1 &&
TURN_LEFT[1] == 1)
{Serial.println("TURN_LEFT_lamp
Fast blink");}
}
//============TURN_RIGHT LAMP
Signal=================
{
if(TURN_RIGHT[0] == 0 &&
TURN_RIGHT[1] == 0)
{Serial.println("TURN_RIGHT_lamp
OFF");}
else if(TURN_RIGHT[0] == 0 &&
TURN_RIGHT[1] == 1)
{
Serial.println("TURN_RIGHT_lamp ON");}
else if (TURN_RIGHT[0] == 1 &&
TURN_RIGHT[1] == 0)
{Serial.println("Reserved");}
else if (TURN_RIGHT[0] == 1 &&
TURN_RIGHT[1] == 1)
{Serial.println("TURN_RIGHT_lamp
Fast blink");}
}
//========DRIVER_DOOR_SIGNAL LAMP Signal=====
if (DRIVER_DOOR_SIGNAL ==
0){Serial.println("DRIVER_DOOR_SIGNAL_lamp off ");}
else{Serial.println("DRIVER_DOOR_SIGNAL_lamp
ON ");}
//========PASSENGER_DOOR_SIGNAL LAMP Signal=========
if (PASSENGER_DOOR_SIGNAL ==
0){Serial.println("PASSENGER_DOOR_SIGNAL_lamp off ");}
else{Serial.println("PASSENGER_DOOR_SIGNAL_lamp
ON ");}
//=======REAR_LH_DOOR LAMP Signal================
if (REAR_LH_DOOR ==
0){Serial.println("REAR_LH_DOOR_SIGNAL_lamp off ");}
else{Serial.println("REAR_LH_DOOR_SIGNAL_lamp
ON ");}
//=============REAR_RH_DOOR LAMP Signal==============
if (REAR_RH_DOOR ==
0){Serial.println("REAR_RH_DOOR_SIGNAL_lamp off ");}
else{Serial.println("REAR_RH_DOOR_SIGNAL_lamp
ON ");}
//=========TAILGATE_OPEN_WARN LAMP Signal==============
if (TAILGATE_OPEN_WARN ==
0){Serial.println("TAILGATE_OPEN_WARN LAMP off ");}
else{Serial.println("TAILGATE_OPEN_WARN LAMP
ON ");}
//=========DOOR_AJAR_WARN LAMP Signal===============
if (DOOR_AJAR_WARN ==
0){Serial.println("DOOR_AJAR_WARN LAMP off ");}
else{Serial.println("DOOR_AJAR_WARN LAMP ON
");}
//=====PARKING_BRAKE_STATUS LAMP Signal===============
if (PARKING_BRAKE_STATUS ==
0){Serial.println("PARKING_BRAKE_STATUS LAMP off ");}
else{Serial.println("PARKING_BRAKE_STATUS LAMP
ON ");}
//=========LOW_WASHER_FLUID LAMP Signal==========
if (LOW_WASHER_FLUID ==
0){Serial.println("LOW_WASHER_FLUID LAMP off ");}
else{Serial.println("LOW_WASHER_FLUID LAMP ON
");}
}
//==========RECEIVE ECU CAN MESSAGE DATA=================
if (canMsg.can_id == 0x355)
Serial.print(canMsg.can_id,HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print("
");
{
for (int i = 0;
i < canMsg.can_dlc; i++) {
canmsg_355_1[i]
= canMsg.data[i];
}
for
(int i = 0; i < canMsg.can_dlc; i++)
{
Serial.print(canmsg_355_1[i],HEX);
Serial.print(" ");
}
Serial.println();
for(int
i=0;i<=7;i++)
{
if(canmsg_355_1[0]
& (1<<i))
{
if(i
== 0)
{
GLOW_PLUG=1;
}
if(i
== 1)
{
WATER_IN_FUEL=1;
}
if(i==2
|| i==3)
{
if(i==2)
{
CRUISE_CONTROL[0]=1;
}
else
{
CRUISE_CONTROL[1]=1;
}
}
if(i
== 4)
{
OIL_PRESS=1;
}
if(i==5
|| i==6)
{
if(i==5)
{
CHECK_ENGINE[0]=1;
}
else
{
CHECK_ENGINE[1]=1;
}
}
if(i
== 7)
{
OBD_CHECK=1;
}
}
else
if(0)
{
if(i
== 0)
{
GLOW_PLUG=0;
}
if(i
== 1)
{
WATER_IN_FUEL=0;
}
if(i==2
|| i==3)
{
if(i==2)
{
CRUISE_CONTROL[0]=0;
}
else
{
CRUISE_CONTROL[1]=0;
}
}
if(i
== 4)
{
OIL_PRESS=0;
}
if(i==5
|| i==6)
{
if(i==5)
{
CHECK_ENGINE[0]=0;
}
else
{
CHECK_ENGINE[1]=0;
}
}
if(i
== 7)
{
OBD_CHECK=0;
}
}
}
for(int i=0;i<=7;i++)
{
if(canmsg_355_1[1]
& (1<<i))
{
ENGINE_SPEED[i]=1;
}
else
{
ENGINE_SPEED[i]=0;
}
}
for(int i=0;i<=7;i++)
{
if(canmsg_355_1[2]
& (1<<i))
{
if(i==0)
{
Start_stop=1;
}
if(i==1)
{
Battery_warn=1;
}
if(i==2)
{
DPF_Warn_lamp=1;
}
if(i==3)
{
DEF_Warn_lamp=1;
}
if(i==4)
{
REDUCED_POWER=1;
}
}
else
if(0)
{
if(i==0)
{
Start_stop=0;
}
if(i==1)
{
Battery_warn=0;
}
if(i==2)
{
DPF_Warn_lamp=0;
}
if(i==3)
{
DEF_Warn_lamp=0;
}
if(i==4)
{
REDUCED_POWER=0;
}
}
}
//========================================GLOW_PLUG
LAMP Signal================================
if (GLOW_PLUG == 0){Serial.println("GLOW_PLUG
LAMP off ");}
else{Serial.println("GLOW_PLUG LAMP ON
");}
//================WATER_IN_FUEL LAMP Signal==============
if (WATER_IN_FUEL ==
0){Serial.println("WATER_IN_FUEL LAMP off ");}
else{Serial.println("WATER_IN_FUEL LAMP ON
");}
//============CRUISE_CONTROL LAMP Signal==========
{
if(CRUISE_CONTROL[0] == 0 &&
CRUISE_CONTROL[1] == 0)
{Serial.println("CRUISE_CONTROL
OFF");}
else if(CRUISE_CONTROL[0] == 0
&& CRUISE_CONTROL[1] == 1)
{
Serial.println("CRUISE_CONTROL ON");}
else if (CRUISE_CONTROL[0] == 1
&& CRUISE_CONTROL[1] == 0)
{Serial.println("Reserved");}
else if (CRUISE_CONTROL[0] == 1
&& CRUISE_CONTROL[1] ==
1)
{Serial.println("CRUISE_CONTROL
Fast blink");}
}
}
//==========READ DATA FROM EPS CAN MESSAGE=============
if (canMsg.can_id == 0x365)
{
Serial.print(canMsg.can_id,
HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
for (int i = 0;
i < canMsg.can_dlc; i++) {
canmsg_365_1
= canMsg.data[i];
}
Serial.print(canmsg_365_1,HEX);
Serial.print(" ");
Serial.println();
if(canmsg_365_1
& (1<<0))
{
EPS_WARN
=1;
}
else
{
EPS_WARN
=0;
}
}
//========READ CAN MESSAGE FROM ESP======================
if(canMsg.can_id == 0x370)
{
Serial.print(canMsg.can_id,
HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
for (int i = 0;
i < canMsg.can_dlc; i++) {
canmsg_370_1[i]
= canMsg.data[i];
}
for (int i = 0;
i < canMsg.can_dlc; i++)
{
Serial.print(canmsg_370_1[i],HEX);
Serial.print(" ");
}
canmsg_370_1[0]
= random(0,255);
Serial.println();
for(int
i=0;i<=7;i++)
{
if(canmsg_370_1[0]
& (1<<i))
{
VEHICLE_SPEED[i]
= 1;
}
else
if(0)
{
VEHICLE_SPEED[i]
= 0;
}
}
for(int
i=0;i<=7;i++)
{
if(canmsg_370_1[1]
& (1<<i))
{
FR_LH_W_SPEED[i]
= 1;
}
else
if(0)
{
FR_LH_W_SPEED[i]
= 0;
}
}
for(int
i=0;i<=7;i++)
{
if(canmsg_370_1[2]
& (1<<i))
{
FR_RH_W_SPEED[i]
= 1;
}
else
if(0)
{
FR_RH_W_SPEED[i]
= 0;
}
}
for(int
i=0;i<=7;i++)
{
if(canmsg_370_1[3]
& (1<<i))
{
RR_LH_W_SPEED[i]
= 1;
}
else
if(0)
{
RR_LH_W_SPEED[i]
= 0;
}
}
for(int
i=0;i<=7;i++)
{
if(canmsg_370_1[4]
& (1<<i))
{
RR_RH_W_SPEED[i]
= 1;
}
else
if(0)
{
RR_RH_W_SPEED[i]
= 0;
}
}
for(int
i=0;i<=7;i++)
{
if(canmsg_370_1[5]
& (1<<i))
{
if(i==0)
{
Vehicle_overspeed_warn
= 1;
}
if(i==1)
{
EPB_WARN
= 1;
}
if(i==2)
{
ABS_MALFUNCTION
= 1;
}
if(i==3
|| i == 4)
{
if(i==3)
{
ESP_WARN_LAMP[0]
= 1;
}
else
{
ESP_WARN_LAMP[1]
= 1;
}
}
}
else
if(0)
{
if(i==0)
{
Vehicle_overspeed_warn
= 0;
}
if(i==1)
{
EPB_WARN
= 0;
}
if(i==2)
{
ABS_MALFUNCTION
= 0;
}
if(i==3
|| i == 4)
{
if(i==3)
{
ESP_WARN_LAMP[0]
= 0;
}
else
{
ESP_WARN_LAMP[1]
= 0;
}
}
}
}
}
//=======Receive DATA from RKE CAN Message==========
if(canMsg.can_id ==0x380)
{
Serial.print(canMsg.can_id, HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
for(int i =0;i<=canMsg.can_dlc; i++)
{
canmsg_380_1[i]
= canMsg.data[i];
}
for
(int i = 0; i <= canMsg.can_dlc; i++)
{
Serial.print(canmsg_380_1[i],HEX);
Serial.print(" ");
}
Serial.println();
for(int
i=0;i<=5;i++)
{
if(canmsg_380_1[0]
& (1<<i))
{
if(i==0)
{
lock_signal
= 1;
}
if(i
== 1)
{
unlock_signal
= 1;
}
if(i
== 2)
{
Trunk_unlock_signal
= 1;
}
if(i
==3)
{
Search_func=1;
}
if(i
==4)
{
Mute_func=1;
}
}
else
if(0)
{
if(i==0)
{
lock_signal
= 0;
}
if(i
== 1)
{
unlock_signal
= 0;
}
if(i
== 2)
{
Trunk_unlock_signal
= 0;
}
if(i
==3)
{
Search_func=0;
}
if(i
==4)
{
Mute_func=1;
}
}
}
}
//========Read DATA from SRS Message============
if(canMsg.can_id == 0x390)
{
Serial.print(canMsg.can_id, HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
canmsg_390_1 = canMsg.data[0];
Serial.print(canmsg_390_1,HEX);
Serial.print(" ");
Serial.println();
for(int i = 0; i<=2;i++)
{
if(canmsg_390_1 & (1<<i))
{
if(i==0)
{
seat_belt_warn=1;
}
if(i==1)
{
Pass_Airbag_cuttoff=1;
}
if(i==2)
{
Airbag_warn=1;
}
}
else if(0)
{
if(i==0)
{
seat_belt_warn=0;
}
if(i==1)
{
Pass_Airbag_cuttoff=0;
}
if(i==2)
{
Airbag_warn=0;
}
}
}
}
//====Read DATA from TCCM CAN Message==================
if(canMsg.can_id == 0x360)
{
Serial.print(canMsg.can_id, HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
canmsg_360_1 = canMsg.data[0];
Serial.print(canmsg_360_1,HEX);
Serial.print(" ");
Serial.println();
for(int i = 0; i<=2;i++)
{
if(canmsg_360_1 & (1<<i))
{
if(i==0 ||i ==1)
{
Warn_4WD[i] =
1;
}
if(i==2)
{
Lock_4WD =1;
}
}
else if(0)
{
if(i==0 ||i ==1)
{
Warn_4WD[i] =
0;
}
if(i==2)
{
Lock_4WD =0;
}
}
}
}
//==Read DATA from
TCU CAN Message==========================
if(canMsg.can_id == 0x395)
{
Serial.print(canMsg.can_id,
HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
canmsg_395_1 = canMsg.data[0];
Serial.print(canmsg_395_1,HEX);
Serial.print(" ");
Serial.println();
for(int i = 0; i<=0;i++)
{
if(canmsg_395_1 & (1<<i))
{
if(i==0)
{
Transmission_warn
= 1;
}
}
else
{
if(i==0)
{
Transmission_warn
= 0;
}
}
}
}
//============Read DATA from TPMS CAN Message===========
if(canMsg.can_id == 0x400)
{
Serial.print(canMsg.can_id, HEX);
Serial.print("
");
Serial.print(canMsg.can_dlc,
HEX);
Serial.print(" ");
for(int i=0;i<=canMsg.can_dlc;i++)
{
canmsg_400[i]=canMsg.data[i];
}
for (int i = 0; i <= canMsg.can_dlc;
i++)
{
Serial.print(canmsg_400[i],HEX);
Serial.print(" ");
}
Serial.println();
for(int i=0;i<=7;i++)
{
if(canmsg_400[0] &
(1<<i))
{
if(i >=0 ||
i<=3)
{
FR_LH_Tire_press[i]
= 1;
}
if(i> 3 ||
i<= 7)
{
FR_RH_Tire_press[i]
= 1;
}
}
else if(0)
{
if(i >=0 || i<=3)
{
FR_LH_Tire_press[i]
= 0;
}
if(i> 3 || i<= 7)
{
FR_RH_Tire_press[i]
= 0;
}
}
}
for(int i=0;i<=7;i++)
{
if(canmsg_400[1] &
(1<<i))
{
if(i >=0 ||
i<=3)
{
RR_LH_Tire_press[i]
= 1;
}
if(i> 3 ||
i<= 7)
{
RR_RH_Tire_press[i]
= 1;
}
}
else if(0)
{
if(i >=0 ||
i<=3)
{
RR_LH_Tire_press[i]
= 0;
}
if(i> 3 ||
i<= 7)
{
RR_RH_Tire_press[i]
= 0;
}
}
}
for(int i=0;i==0;i++)
{
if(canmsg_400[2] &
(1<<i))
{
if(i ==0)
{
Tire_press_warn=1;
}
}
else if(0)
{
if(i ==0)
{
Tire_press_warn=0;
}
}
}
}
//=======Send DATA to Instrument Cluster =======
//=======OIL_PRESS LAMP Signal========================
if (OIL_PRESS ==
0){Serial.println("OIL_PRESSURE LAMP off ");}
else{Serial.println("OIL_PRESSURE LAMP ON
");}
//============CHECK_ENGINE LAMP Signal==============
{
if(CHECK_ENGINE[0] == 0 &&
CHECK_ENGINE[1] == 0)
{Serial.println("CHECK_ENGINE LAMP
OFF");}
else if(CHECK_ENGINE[0] == 0 &&
CHECK_ENGINE[1] == 1)
{
Serial.println("CHECK_ENGINE LAMP ON");}
else if (CHECK_ENGINE[0] == 1
&& CHECK_ENGINE[1] == 0)
{Serial.println("Reserved");}
else if (CHECK_ENGINE[0] == 1
&& CHECK_ENGINE[1] ==
1)
{Serial.println("CHECK_ENGINE
LAMP Fast blink");}
}
//=============OBD_CHECK LAMP Signal===============
if (OBD_CHECK == 0){Serial.println("OBD_CHECK
LAMP off ");}
else{Serial.println("OBD_CHECK LAMP ON
");}
//==========Start_stop LAMP Signal============
if (Start_stop ==
0){Serial.println("Start_stop LAMP off ");}
else{Serial.println("Start_stop LAMP ON
");}
//=====Battery_warn LAMP Signal===================
if (Battery_warn ==
0){Serial.println("Battery_warn LAMP off ");}
else{Serial.println("Battery_warn LAMP ON
");}
//============DPF_Warn_lamp LAMP Signal===========
if (DPF_Warn_lamp ==
0){Serial.println("DPF_Warn_lamp LAMP off ");}
else{Serial.println("DPF_Warn_lamp LAMP ON
");}
//===========DEF_Warn_lamp LAMP Signal================
if (DEF_Warn_lamp ==
0){Serial.println("DEF_Warn_lamp LAMP off ");}
else{Serial.println("DEF_Warn_lamp LAMP ON
");}
//=======REDUCED_POWER LAMP Signal======================
if (REDUCED_POWER == 0){Serial.println("REDUCED_POWER
LAMP off ");}
else{Serial.println("REDUCED_POWER LAMP ON
");}
//==========EPS_WARN LAMP Signal====================
if (EPS_WARN == 0){Serial.println("EPS_WARN
LAMP off ");}
else{Serial.println("EPS_WARN LAMP ON
");}
//====Vehicle_overspeed_warn LAMP Signal==============
if (Vehicle_overspeed_warn ==
0){Serial.println("Vehicle_overspeed_warn LAMP off ");}
else{Serial.println("Vehicle_overspeed_warn
LAMP ON ");}
//====EPB_WARN LAMP Signal===========================
if (EPB_WARN == 0){Serial.println("EPB_WARN
LAMP off ");}
else{Serial.println("EPB_WARN LAMP ON
");}
//====ABS_MALFUNCTION LAMP Signal================
if (ABS_MALFUNCTION ==
0){Serial.println("ABS_MALFUNCTION LAMP off ");}
else{Serial.println("ABS_MALFUNCTION LAMP ON
");}
//=======ESP_WARN LAMP Signal====================
{
if(ESP_WARN_LAMP[0] == 0 &&
ESP_WARN_LAMP[1] == 0)
{Serial.println("ESP_WARN_ LAMP
OFF");}
else if(ESP_WARN_LAMP[0] == 0
&& ESP_WARN_LAMP[1] == 1)
{
Serial.println("ESP_WARN LAMP ON");}
else if (ESP_WARN_LAMP[0] == 1
&& ESP_WARN_LAMP[1] == 0)
{Serial.println("Reserved");}
else if (ESP_WARN_LAMP[0] == 1
&& ESP_WARN_LAMP[1] ==
1)
{Serial.println("ESP_WARN
LAMP Fast blink");}
}
//=========lock_signal LAMP Signal==================
if (lock_signal ==
0){Serial.println("lock_signal LAMP off ");}
else{Serial.println("lock_signal LAMP ON
");}
//=============unlock_signal
LAMP Signal===================
if (unlock_signal ==
0){Serial.println("unlock_signal LAMP off ");}
else{Serial.println("unlock_signal LAMP ON
");}
//===========Trunk_unlock_signal LAMP Signal================
if (Trunk_unlock_signal ==
0){Serial.println("Trunk_unlock_signal LAMP off ");}
else{Serial.println("Trunk_unlock_signal LAMP
ON ");}
//===========Search_func LAMP Signal======================
if (Search_func == 0){Serial.println("Search_func
LAMP off ");}
else{Serial.println("Search_func LAMP ON
");}
//=============Mute_func LAMP Signal=================
if (Mute_func == 0){Serial.println("Mute_func
LAMP off ");}
else{Serial.println("Mute_func LAMP ON
");}
//==========seat_belt_warn LAMP Signal=============
if (seat_belt_warn ==
0){Serial.println("seat_belt_warn LAMP off ");}
else{Serial.println("seat_belt_warn LAMP ON
");}
//=========Pass_Airbag_cuttoff LAMP Signal================
if (Pass_Airbag_cuttoff ==
0){Serial.println("Pass_Airbag_cuttoff LAMP off ");}
else{Serial.println("Pass_Airbag_cuttoff LAMP
ON ");}
//=========Airbag_warn LAMP Signal===================
if (Airbag_warn == 0){Serial.println("Airbag_warn
LAMP off ");}
else{Serial.println("Airbag_warn LAMP ON
");}
//========Warn_4WD LAMP Signal=========================
{
if(Warn_4WD[0] == 0 && Warn_4WD[1] ==
0)
{Serial.println("Warn_4WD LAMP
OFF");}
else if(Warn_4WD[0] == 0 &&
Warn_4WD[1] == 1)
{
Serial.println("Warn_4WD LAMP ON");}
else if (Warn_4WD[0] == 1 &&
Warn_4WD[1] == 0)
{Serial.println("Reserved");}
else if (Warn_4WD[0] == 1 &&
Warn_4WD[1] == 1)
{Serial.println("Warn_4WD
LAMP Fast blink");}
}
//==========Lock_4WD LAMP Signal=======================
if (Lock_4WD == 0){Serial.println("Lock_4WD
LAMP off ");}
else{Serial.println("Lock_4WD LAMP ON
");}
//==============Transmission_warn LAMP Signal==========
if (Transmission_warn ==
0){Serial.println("Transmission_warn LAMP off ");}
else{Serial.println("Transmission_warn LAMP ON
");}
//=========Tire_press_warn LAMP Signal================
if (Tire_press_warn ==
0){Serial.println("Tire_press_warn LAMP off ");}
else{Serial.println("Tire_press_warn LAMP ON
");}
}
//======Sending Message 350========================
canMsg1.can_id = 0x350;
canMsg1.can_dlc = 2;
//canMsg1.data[0] =
(canMsg_350_byte_1,HEX);
canMsg1.data[1] = canMsg_350_byte_2;
canMsg1.data[0] = FOG_LAMP_SIGNAL |
(VEHICLE_ARMED_STATUS<<1) | (REAR_FOG_LAMP<<2) |
(HEAD_LAMP_HIGH_BEAM<<3) | (TURN_LEFT[0]<<4) |
(TURN_LEFT[1]<<5) | (TURN_RIGHT[0]<<6) |(TURN_RIGHT[0]<<7);
canMsg_350_byte_2 = DRIVER_DOOR_SIGNAL
| (PASSENGER_DOOR_SIGNAL<<1) | (REAR_LH_DOOR << 2) |
(REAR_RH_DOOR<<3) | (TAILGATE_OPEN_WARN<<4) |
(DOOR_AJAR_WARN<<5) | (PARKING_BRAKE_STATUS << 6) |
(LOW_WASHER_FLUID<<7);
mcp2515.sendMessage(&canMsg1);
//=======Sending Message 355=======================
canMsg2.can_id = 0x355;
canMsg2.can_dlc = 3;
canMsg2.data[0] = canMsg_355_byte_1;
canMsg2.data[1] = canMsg_355_byte_2;
canMsg2.data[1] = canMsg_355_byte_3;
canMsg_355_byte_1 = GLOW_PLUG |
(WATER_IN_FUEL<<1) | (CRUISE_CONTROL[0] << 2) | (CRUISE_CONTROL[1]
<< 3) | (OIL_PRESS << 4) | (CHECK_ENGINE[0] << 5) |
(CHECK_ENGINE[1] << 6) | (OBD_CHECK<<7);
//canMsg_355_byte_2 = ENGINE_SPEED[0] |
(ENGINE_SPEED[1]<<1) | (ENGINE_SPEED[2]<<2) |
(ENGINE_SPEED[3]<<3) | (ENGINE_SPEED[4]<<4) |
(ENGINE_SPEED[5]<<5) | (ENGINE_SPEED[6]<<6) |
(ENGINE_SPEED[7]<<7);
canMsg_355_byte_3 = Start_stop |
(Battery_warn<<1) | (DPF_Warn_lamp<<2) | (DEF_Warn_lamp<<3) |
(REDUCED_POWER<<4);
for(int i=0;i<=7;i++)
{
canMsg_355_byte_2 = canMsg_355_byte_2 |
(ENGINE_SPEED[i]<<i);
}
mcp2515.sendMessage(&canMsg2);
//===========Sending Message 360==========================
canMsg3.can_id = 0x360;
canMsg3.can_dlc = 1;
canMsg3.data[0] = canMsg_360_byte_1;
canMsg_360_byte_1 = Warn_4WD[0]|
(Warn_4WD[1]<<1) | (Lock_4WD << 2);
mcp2515.sendMessage(&canMsg3);
//=========Sending Message 365=====================
canMsg4.can_id = 0x365;
canMsg4.can_dlc = 1;
canMsg4.data[0] = EPS_WARN;
mcp2515.sendMessage(&canMsg4);
//==========Sending Message 370======================
canMsg5.can_id = 0x370;
canMsg5.can_dlc = 6;
canMsg5.data[0] = VEHICLE_SPEED[0] |
(VEHICLE_SPEED[1]<<1) | (VEHICLE_SPEED[2]<<2) |
(VEHICLE_SPEED[3]<<3) | (VEHICLE_SPEED[4]<<4) |
(VEHICLE_SPEED[5]<<5) | (VEHICLE_SPEED[6]<<6) |
(VEHICLE_SPEED[7]<<7);
canMsg5.data[1] = FR_LH_W_SPEED[0] |
(FR_LH_W_SPEED[1]<<1) | (FR_LH_W_SPEED[2]<<2) |
(FR_LH_W_SPEED[3]<<3) | (FR_LH_W_SPEED[4]<<4) |
(FR_LH_W_SPEED[5]<<5) | (FR_LH_W_SPEED[6]<<6) |
(FR_LH_W_SPEED[7]<<7);
canMsg5.data[2] = FR_RH_W_SPEED[0] |
(FR_RH_W_SPEED[1]<<1) | (FR_RH_W_SPEED[2]<<2) |
(FR_RH_W_SPEED[3]<<3) | (FR_RH_W_SPEED[4]<<4) |
(FR_RH_W_SPEED[5]<<5) | (FR_RH_W_SPEED[6]<<6) |
(FR_RH_W_SPEED[7]<<7);
canMsg5.data[3] = RR_LH_W_SPEED[0] |
(RR_LH_W_SPEED[1]<<1) | (RR_LH_W_SPEED[2]<<2) |
(RR_LH_W_SPEED[3]<<3) | (RR_LH_W_SPEED[4]<<4) |
(RR_LH_W_SPEED[5]<<5) | (RR_LH_W_SPEED[6]<<6) |
(RR_LH_W_SPEED[7]<<7);
canMsg5.data[4] = RR_RH_W_SPEED[0] |
(RR_RH_W_SPEED[1]<<1) | (RR_RH_W_SPEED[2]<<2) |
(RR_RH_W_SPEED[3]<<3) | (RR_RH_W_SPEED[4]<<4) |
(RR_RH_W_SPEED[5]<<5) | (RR_RH_W_SPEED[6]<<6) |
(RR_RH_W_SPEED[7]<<7);
canMsg5.data[5] =
Vehicle_overspeed_warn | EPB_WARN | ABS_MALFUNCTION | ESP_WARN_LAMP[0] |
ESP_WARN_LAMP[1];
mcp2515.sendMessage(&canMsg5);
//=============Sending Message 380=================
canMsg6.can_id = 0x380;
canMsg6.can_dlc = 1;
canMsg6.data[0] = lock_signal |
(unlock_signal<<1) | (Trunk_unlock_signal<<2) |
(Search_func<<3) | (Mute_func<<4);
mcp2515.sendMessage(&canMsg6);
//=============Sending Message 390=================
canMsg7.can_id = 0x390;
canMsg7.can_dlc = 1;
canMsg7.data[0] = seat_belt_warn |
(Pass_Airbag_cuttoff<<1) | (Airbag_warn<<2);
mcp2515.sendMessage(&canMsg7);
//===========Sending Message 395=====================
canMsg8.can_id = 0x395;
canMsg8.can_dlc = 1;
canMsg8.data[0] = Transmission_warn;
mcp2515.sendMessage(&canMsg8);
//================Sending Message 400=================
canMsg9.can_id = 0x400;
canMsg9.can_dlc = 3;
canMsg9.data[0] = FR_LH_Tire_press[0] |
(FR_LH_Tire_press[1]<<1) | (FR_LH_Tire_press[2]<<2) |
(FR_LH_Tire_press[3]<<3) | (VEHICLE_SPEED[4]<<4) |
(FR_RH_Tire_press[5]<<5) | (FR_RH_Tire_press[6]<<6) |
(FR_RH_Tire_press[7]<<7);
canMsg9.data[1] = RR_LH_Tire_press[0] |
(RR_LH_Tire_press[1]<<1) | (RR_LH_Tire_press[2]<<2) |
(RR_LH_Tire_press[3]<<3) | (RR_RH_Tire_press[4]<<4) |
(RR_RH_Tire_press[5]<<5) | (RR_RH_Tire_press[6]<<6) |
(RR_RH_Tire_press[7]<<7);
canMsg9.data[2] = Tire_press_warn;
mcp2515.sendMessage(&canMsg8);
}
//***********************************************************
CAN
COMMUNICATION MATRIX
Overview:
In this CAN DBC, have created twelve ECU’s in the vehicle and its messages and relevant signals. Using this dbc how the messages and signals are transmitting and receiving between ECU’s are analysed by converting into physical values.

About
Network Nodes:
The
ECU’s created in this DBC are listed below:
·
Body Control Module.(BCM)
·
Engine Management System.(EMS)
·
Electronic Power Steering Module.(EPS)
·
Electronic Stability Program.(ESP)
·
Instrument Cluster Module.(ICM)
·
In Vehicle Infotainment Module.(IVI)
·
Remote Keyless Entry.(RKE)
·
Supplementary Restraint System.(SRS)
·
Transfer Case Control Module.(TCCM)
·
Transmission Control Unit.(TCU)
·
Tire Pressure Monitoring System.(TPMS)
CAN MESSAGES:
Each CAN messages are created and mapped to their respective transmitting and
receiving ECU’s. Multiple CAN signals are mapped inside single CAN message. The
CAN-ID is used according to message prioritization and communication. Inside
each messages, respective signal are mapped.

Here comes the signal mapping done inside each message:
For
example, the bit allocation inside Body control module Message ID 350 is shown
below:
BCM CAN Message Signal Mapped Layout

As
body control module is responsible for transmitting following signal:
Ø Turn Left Indicator
Ø Turn Right Indicator
Ø Fog Lamp Signal
Ø Door Ajar Warning
Ø Each Door Open/close
Status
Ø Washer Fluid Status
Ø Low Fuel Indicator
Ø Parking Brake Status, etc.,.
Bit allocation is done according to their individual
function. If the signal responsible for only Warning Lamp On/Off means One bit
is enough (0/1). If the signal need to transmit several functions like Warning
Lamp On/Off/Blink for some duration then it requires two bit
(On/Off/Blink/reserve). Like this all signals are mapped to their respective
signals accordingly.
CAN SIGNALS:
CAN signals are individual piece of data about the vehicle. These
signals are created and mapped to their corresponding messages to communicate
through CAN bus.
Signal Creation In CAN DBC
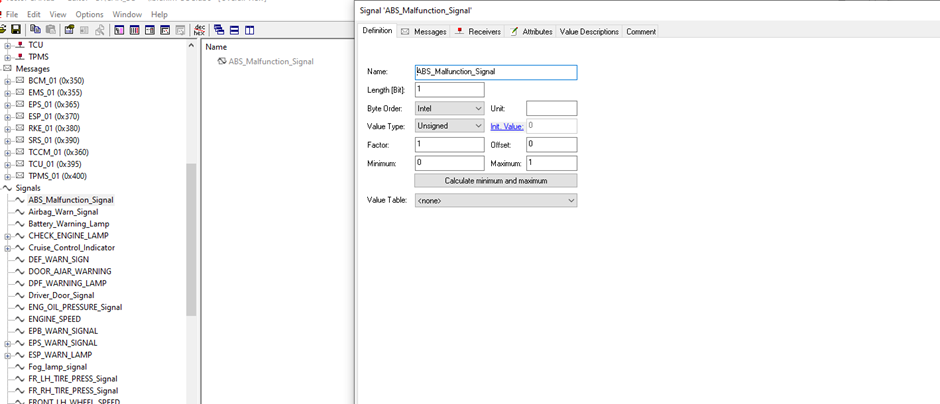
In this signal as mentioned ABS malfunction signal
created, this signal is responsible for indicating any malfunction inside ABS
system and any issues found signal should pass through CAN bus by CAN message
to IC module to On the ABS warning Lamp. Like this, all signals have to send
their information through CAN bus.

RKE Implementation with CAN
//===========================Program
for RKE Feature Application Using CAN ====
#include
<SPI.h>
#include
<mcp2515.h>
MCP2515
mcp2515(53);
//===============CAN Message Declaration===========================
struct
can_frame canMsg1; //Door lock
struct
can_frame canMsg2;//Theft Alarm
struct
can_frame canMsg3;//Auto-lock
struct
can_frame canMsg4;//Door Unlock
struct
can_frame canMsg5;//Auto-relock
struct
can_frame canMsg6;//Search Alarm
struct
can_frame canMsg7;//Panic Alarm
struct
can_frame canMsg8;//Trunk_door_unlock
struct
can_frame canMsg9;//Auto_unlock
struct
can_frame canMsg10;//Emergency_Function
//=======================================Variable
Declaration========
int
RKE_input_id_200[7]; //To get input
from RKE
int
lock_button, unlock_button, trunk_button; //Initializing the variable for
remote keyless entry Button
bool
driver_dr_switch, passenger_dr_switch, rear_lh_dr_switch, rear_rh_dr_switch,
trunk_dr_switch; //Initializing the variable for dr switches
bool
hazard_lamp, alarm_horn, RCM_module, buzzer;//Output device variable
declaration
int Key_cylinder_switch; //1-OFF, 2-ON, 3-Acc
int
speed_sensor_input, Button_press_timer,
battery_power;
bool
driver_dr_solenoid_valve, passenger_dr_solenoid_valve,
rear_lh_dr_solenoid_valve, rear_rh_dr_solenoid_valve, trunk_dr_solenoid_valve,
Driver_center_lock, vehicle_armed =1; //Initializing the variable for Solenoid
valve
void setup()
{
Serial.begin(9600);
mcp2515.reset();
mcp2515.setBitrate(CAN_500KBPS, MCP_8MHZ);
mcp2515.setNormalMode();
canMsg1.can_id = 0x100;
canMsg1.can_dlc = 1;
canMsg1.data[0] = 0x11;
canMsg2.can_id = 0x100;
canMsg2.can_dlc = 2;
canMsg2.data[1] = 0x22;
canMsg3.can_id = 0x100;
canMsg3.can_dlc = 3;
canMsg3.data[2] = 0x33;
canMsg4.can_id = 0x100;
canMsg4.can_dlc = 4;
canMsg4.data[3] = 0x44;
canMsg5.can_id = 0x100;
canMsg5.can_dlc = 5;
canMsg5.data[4] = 0x55;
canMsg6.can_id = 0x100;
canMsg6.can_dlc = 6;
canMsg6.data[5] = 0x66;
canMsg7.can_id = 0x100;
canMsg7.can_dlc = 7;
canMsg7.data[6] = 0x77;
canMsg8.can_id = 0x100;
canMsg8.can_dlc = 8;
canMsg8.data[7] = 0x88;
canMsg9.can_id = 0x110;
canMsg9.can_dlc = 1;
canMsg9.data[0] = 0x99;
canMsg10.can_id = 0x110;
canMsg10.can_dlc = 2;
canMsg10.data[1] = 0xAA;
}
void loop() {
if (mcp2515.readMessage(&canMsg) ==
MCP2515::ERROR_OK) {
if (canMsg.can_id == 0x200)
{
for (int i = 0; i < canMsg.can_dlc;
i++)
RKE_input_id_200[0] = (canMsg.data[0]);
Button_press_timer= (canMsg.data[1]);
Key_cylinder_switch = (canMsg.data[2]);
driver_dr_switch = (canMsg.data[3]);
passenger_dr_switch = (canMsg.data[4]);
rear_lh_dr_switch = (canMsg.data[5]);
rear_rh_dr_switch = (canMsg.data[6]);
trunk_dr_switch = (canMsg.data[7]);
Serial.print("RKE_input_id_200[0]: ");
Serial.println(RKE_input_id_200[0]);
}
if(canMsg.can_id == 0x210)
{
for (int i = 0; i < canMsg.can_dlc;
i++)
speed_sensor_input = (canMsg.data[0]);
RCM_module= (canMsg.data[1]);
battery_power = (canMsg.data[2]);
}
}
switch (RKE_input_id_200[0]) {
case 1:
lock_button =1;
RKE_lock_Func(); //This
function includes locking the vehicle with RKE, Anti-theft alarm, RKE battery
monitoring
mute_func(); //This function is for mute function
special_condition_1(); //This function will execute when any door
kept unclosed after getting RKE_lock comment
special_condition_2();
special_condition_3();
break;
case 2:
unlock_button =2;
RKE_unlock_Func(); //This function includes vehicle
unlocking with RKE, vehicle search function and Panic alarm
break;
case 3:
trunk_button = 3;
RKE_input_id_200[0] = trunk_button;
trunk_door_unlock(); //This function will unlock trunk door
break;
}
//=Condition to unlock
all the doors when key turned off - Auto Unlocking===
//auto_unlock()
if (Key_cylinder_switch == 3 &&
speed_sensor_input == 0 && unlock_button == 0)
{
door_unlock();
Serial.println("hello :");
Serial.print(unlock_button);
hazard_lamp_unlock();
mcp2515.sendMessage(&canMsg9);
}
//==========Condition to unlock
all the doors at emergency suituation==========
//emergency_unlock()
if (RCM_module == 1) //During accident or any emergency all
doors unlocked
{
door_unlock();
hazard_lamp = alarm_horn = 1;
Serial.print("Alert!!!All doors
opened");
mcp2515.sendMessage(&canMsg10);
}
//======Condition to check driver door lock
knob is closed then close all the door - Center lock======================
//center_lock()
if (door_closed() == 1)
{
if (Driver_center_lock == 1)
{
door_lock();
hazard_lamp_lock();
beep_function();
}
}
//===condition to check vehicle speed is
above 20km/hr then automatically close all doors - Auto lock================
//autolock()
if (Key_cylinder_switch == 2 &&
speed_sensor_input > 20 )
{
door_lock();
mcp2515.sendMessage(&canMsg3);
}
}
//===============
Function DECLARATION ===========================================
//===========Function
Declaration for RKE function Execution==========================
int
RKE_lock_Func()
{
if (lock_button == 1 &&
Button_press_timer < 3)
{
if (door_closed() == 1)
{
if (battery_power < 30) //Monitorig
RKE battery
{
Serial.println("RKE battery is too
low");
}
door_lock();
hazard_lamp_lock();
mcp2515.sendMessage(&canMsg1);
while (unlock_button == 0 &&(
Key_cylinder_switch == 2 || door_unlock_check_theft() == 1)) //Anti-theft alarm
activation while opening of any doors after vehicle armed
{
hazard_lamp = alarm_horn = 1;
Serial.println("Alert!!! Theft
attempt");
mcp2515.sendMessage(&canMsg2);
beep_function();
}
}
else
{
Serial.println("Please close all
doors and try again");
}
}
}
//=====Condition
to unlock all the doors by getting input from RKE===========
int
RKE_unlock_Func()
{
if (unlock_button == 2 &&
vehicle_armed == 1 )
{
if (Button_press_timer < 3)
{
door_unlock();
mcp2515.sendMessage(&canMsg4);
millis();
hazard_lamp_unlock(); //Auto-relocking
while (door_closed() == 1)
{
Serial.println("Timer
begins");
if (millis() > 30000)
{
door_lock();
mcp2515.sendMessage(&canMsg5);
hazard_lamp_lock();
}
}
}
if (Button_press_timer > 3)
{
switch (Key_cylinder_switch) //Panic and search function
{
case 1:
Serial.println("Search Function
activated");
timer_alarm();
mcp2515.sendMessage(&canMsg6);
break;
case 2:
Serial.println("Panic Function
activated");
timer_alarm();
Serial.println("Panic Function
activated");
mcp2515.sendMessage(&canMsg7);
break;
}
}
}
}
//=========Condition
to unlock trunk door========================================
void
trunk_door_unlock()
{
if (trunk_button == 3 )
{
int i;
if (trunk_dr_solenoid_valve == 1)
{
trunk_dr_solenoid_valve = 0;
Serial.println("trunk door unlocked
successfully");
mcp2515.sendMessage(&canMsg8);
for ( i = 1; i <= 4; i++)
{
hazard_lamp = 1;
delay(500);
hazard_lamp = 0;
}
}
}
}
//========mute/unmute
function=========================================
void
mute_func()
{
int m;
if (lock_button == 1) //checking vehicle
locked
{
while (Button_press_timer >= 3
&& millis() < 30000)
{
buzzer = alarm_horn = 0;
Serial.println("buzzer muted");
while (m > 2)
{
hazard_lamp = 1;
delay(500);
hazard_lamp = 0;
m++;
}
}
}
}
//Special
conditions : if any doors opened with RKE locked hazazard lamp flash for five
times with alarm=====
void
special_condition_1()
{
if (lock_button == 1 &&
Button_press_timer < 3)
{
if (door_opened() == 1)
{
int i;
Serial.println("please close all the
doors");
for (i = 1; i <= 5; i++)
{
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
}
}
}
// ===Condition to lock the door
if driver door closed but any other door opened ==========
void
special_condition_2()
{
if (door_opened() == 1)
{
if (lock_button == 1 &&
Button_press_timer <= 3)
{
if (driver_dr_switch == 1)
{
driver_dr_solenoid_valve = 1;
Serial.println("Driver door
closed");
if (passenger_dr_switch == 1)
{
passenger_dr_solenoid_valve = 1;
Serial.println("Passenger door
closed");
}
else
{
Serial.println("Please close
Passenger door");
}
if (rear_lh_dr_switch == 1)
{
rear_lh_dr_solenoid_valve = 1;
Serial.println("rear lh
door closed");
}
else
{
Serial.println("Please close
rear lh door");
}
if (rear_rh_dr_switch == 1)
{
rear_rh_dr_solenoid_valve = 1;
Serial.println("rear rh door
closed");
}
else
{
Serial.println("Please close
rear rh door");
}
if (trunk_dr_switch == 1)
{
trunk_dr_solenoid_valve = 1;
}
else
{
Serial.println("Please close
trunk door");
}
hazard_lamp_lock();
}
}
}
}
//
=================If driver door is opened while RKE locking================
void
special_condition_3()
{
if (lock_button == 1 &&
Button_press_timer <= 3)
{
if (driver_dr_switch == 0)
{
Serial.println("RKE lock function
not activated and close the driver door and relock with RKE");
}
}
}
//=========================================
Hazard lamp Lock Function===================================
void
hazard_lamp_lock() //Declaring
functions to activate hazardous lamp and alarm horn when RKE locks the door
{
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
Serial.println("Hazard lamp with alarm
flash for one time");
}
//==============
Hazard lamp Unlock Function=========================
void
hazard_lamp_unlock()
{
int i;
for (i = 1; i <= 2; i++)
{
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
Serial.println("Hazard lamp with alarm
flash for two time");
}
//============
Function to check all the doors are closed========================
int
door_closed() {
if (driver_dr_switch == 1 &&
passenger_dr_switch == 1 && rear_lh_dr_switch == 1 &&
rear_rh_dr_switch == 1 && trunk_dr_switch == 1)
{
return 1;
}
else
{
return 0;
}
}
//========================
Function to check all the doors are open=======
int
door_opened() {
if (driver_dr_switch == 0 ||
passenger_dr_switch == 0 || rear_lh_dr_switch == 0 || rear_rh_dr_switch == 0 ||
trunk_dr_switch == 0)
{
return 1;
}
else
{
return 0;
}
}
//============================
Function to lock the door solenoid valves ========
int
door_lock() {
driver_dr_solenoid_valve =
passenger_dr_solenoid_valve = rear_lh_dr_solenoid_valve =
rear_rh_dr_solenoid_valve = trunk_dr_solenoid_valve = 1;
Serial.println("All doors are locked
successfully");
vehicle_armed = 1;
}
//=============================
Function to Unlock the door solenoid valves ============
int
door_unlock() {
driver_dr_solenoid_valve =
passenger_dr_solenoid_valve = rear_lh_dr_solenoid_valve = rear_rh_dr_solenoid_valve
= 0;
Serial.println("All doors are unlocked
successfully");
vehicle_armed = 0;
}
//==================
Function to check the doors are unlocked for theft
=======
bool door_unlock_check_theft()
{
if (driver_dr_solenoid_valve == 0 ||
passenger_dr_solenoid_valve == 0 || rear_lh_dr_solenoid_valve == 0 ||
rear_rh_dr_solenoid_valve == 0 || trunk_dr_solenoid_valve == 0 ||
driver_dr_switch == 0 || passenger_dr_switch == 0 || rear_lh_dr_switch == 0 ||
rear_rh_dr_switch == 0 || trunk_dr_switch == 0 )
{
return 1;
}
else
{
return 0;
}
}
//==============
Function to check all the doors are locked================
bool
door_lock_check()
{
if (driver_dr_solenoid_valve ==
passenger_dr_solenoid_valve == rear_lh_dr_solenoid_valve ==
rear_rh_dr_solenoid_valve == trunk_dr_solenoid_valve == 1)
{
return 1;
}
else
{
return 0;
}
}
//=================
Alarm function declaration=================================
int
timer_alarm() {
while (millis() <= 30003)
{
Serial.println("Hazard lamp with alarm
horn activated for 30s");
hazard_lamp = alarm_horn = 1;
delay(500);
hazard_lamp = alarm_horn = 0;
}
}
//=========================Beep
Function=======================================
int
beep_function()
{
while (door_opened() == 1 && millis()
< 30000) //when all doors are locked
{
buzzer = 1;
Serial.println("Buzzer ON,Please close
the door");
}
if (door_opened() == 0)
{
buzzer = 0;
Serial.println("Buzzer off");
}
}
//=========================Seat Belt Warning
Application===============================
//===================Declaring variables for Input
Parameters============================
bool DR_seat_belt_button, PS_seat_belt_button, RR_LH_seat_belt_button;
bool RR_RH_seat_belt_button; //Input parameter
bool DR_Occupant_sensor, PS_Occupant_sensor,
RR_LH_Occupant_sensor, RR_RH_Occupant_sensor;
int Key_cylinder_status , Speedometer, odometer ,Engine
speed_sensor ;
//===================Declaring variables for Output
Parameters===========================
bool Seat_belt_warn_lamp, buzzer;
void setup() {
Serial.begin(9600);
}
void loop() {
//==================================Driver seat belt
Remainder========================
if (Key_cylinder_status
==2 && DR_seat_belt_button == 0)
{
while(millis()<6000)
{
Seat_belt_warn_lamp = buzzer=1;
Serial.println("Seat_belt_warn_lamp and Buzzer On");
delay(20);
Seat_belt_warn_lamp =buzzer =0;
Serial.println("Seat_belt_warn_lamp and Buzzer Off");
delay(1180);
}
while(millis()>6000 && millis()<=10000)
{
Seat_belt_warn_lamp =1;
Serial.println("Seat_belt_warn_lamp On");
}
}
Seat_belt_warn_lamp =0;
while(millis()
>10000 && millis() <10005)
{
Serial.println("Seat_belt_warn_lamp Off");
delay(3000);
}
//====================Continous Seatbelt remainder while
Vehicle Moving ==================
if ((Key_cylinder_status ==2 && DR_seat_belt_button
== 0) && Engine_speed_sensor !=0 ||Speedometer !=0 || odometer >=0.5
)
{
if(millis()<32000 && millis()>28000)
{
Serial.println("WARNING! buckle the seat belt");
}
if(millis()>=28000 && millis()>38000)
{
Seat_belt_warn_lamp = buzzer=1;
Serial.println("Seat_belt_warn_lamp and Buzzer On");
delay(500);
Seat_belt_warn_lamp =buzzer =0;
Serial.println("Seat_belt_warn_lamp and Buzzer Off");
delay(500);
}
}
if((Key_cylinder_status
==2 && DR_seat_belt_button == 0) && (Speedometer>=25))
{
Seat_belt_warn_lamp = buzzer=1;
Serial.println("Seat_belt_warn_lamp and Buzzer On");
delay(500);
Seat_belt_warn_lamp =buzzer =0;
Serial.println("Seat_belt_warn_lamp and Buzzer Off");
delay(500);
}
//==================Continous suphosticated Seatbelt
remainder =========================
if ((Key_cylinder_status ==2 && DR_seat_belt_button
== 0) && Engine_speed_sensor !=0 ||Speedometer !=0 || odometer >=1 )
{
if(millis()<18000)
{
Serial.println("WARNING! buckle the seat belt");
}
if(millis()>=18000 && millis()>28000)
{
Seat_belt_warn_lamp = buzzer=1;
Serial.println("Seat_belt_warn_lamp and Buzzer On");
delay(500);
Seat_belt_warn_lamp =buzzer =0;
Serial.println("Seat_belt_warn_lamp and Buzzer Off");
delay(500);
}
}
if((Key_cylinder_status ==2 && DR_seat_belt_button == 0)
&& (Speedometer>=40))
{
Seat_belt_warn_lamp
= buzzer=1;
Serial.println("Seat_belt_warn_lamp and Buzzer On");
delay(500);
Seat_belt_warn_lamp =buzzer =0;
Serial.println("Seat_belt_warn_lamp and Buzzer Off");
delay(500);
}
}
//***********************************************************************************************************